Rotational Motion deals with the motion of Objects while rotating. Prior to this unit, we viewed every object as a single center of mass, but in this unit we have to understand that objects of the same mass can have different rotational inertias. This was shown in class by comparing the speed of a ring and a disc of the same mass rolling down an incline.
This video demonstrates and explains the race between the disc and the ring and why the disc went faster.
Formulas and Variables

|
|
This video is a good introduction to rotational motion and goes over the new values associated with rotational motion such as angular acceleration, rotational inertia, and angular velocity.
Extended Free Body Diagrams
In order to model torque, we need to be able to draw extended free body diagrams. They are similar to normal free body diagrams, but they have multiple points where forces are acting.
Application of Rotational Motion
- Rotational motion formulas can be used very similarly to linear motion formulas
- We have to know how to use rotational values to find unknowns similarly to how we did in previous units
Practice Problems
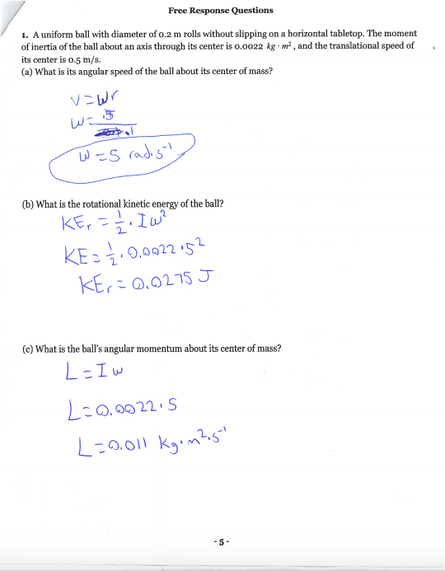
|
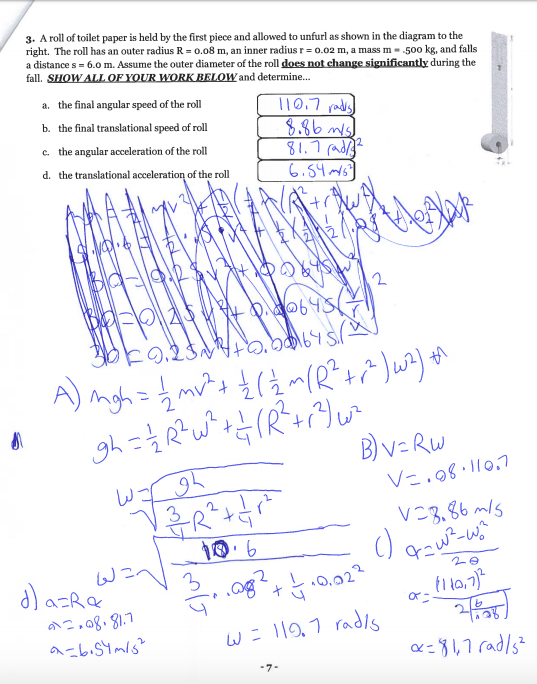
|
Widget is loading comments...
